Thanks to everyone who attended Robot Opera as part of Performance Space Liveworks Festival of Experimental Art. We got great critical feedback on the show and it was a resounding success.


music, sound, ambient media
Thanks to everyone who attended Robot Opera as part of Performance Space Liveworks Festival of Experimental Art. We got great critical feedback on the show and it was a resounding success.

We’re counting down to the opening night of Robot Opera at Bay 17 in Carriageworks in Sydney. Presented by Performance Space as part of the Liveworks Festival of Experimental Art, we have one final development week next week before it opens on October 22, running until November 1. This is a creatively and technically ambitious performance work for 8 non-humanoid robot performers which promises to be really something.
http://performancespace.com.au/events/liveworks-robot-opera/
CREATIVE TEAM
Artist Wade Marynowsky
Music and Sound Design Julian Knowles
Lighting Design Mirabelle Wouters
Dramaturgy Lee Wilson
TECHNICAL TEAM
Electrical Design Ben Nash
Programmer Imran Khan
Programmer Adam Hinshaw
You can see the whole program for the Liveworks festival below
http://issuu.com/performancespace/docs/liveworks_brochure_web_singles/1?e=2989306/30124008

I’m currently working on the music and sound design for a major new robotic performance work by Wade Marynowsky called ‘Robot Opera’. The project is funded by a Creative Australia grant from the Australia Council for the Arts. We’ve just completed a 3 week creative development period at The Red Box in Lilyfield, Sydney.

Developed in collaboration with contemporary performance group Branch Nebula, Robot Opera features eight larger than life-sized rectangular robot performers in a one hour work co-presented by Carriageworks and Performance Space at Carriageworks Bay 17 in October 2015
http://performancespace.com.au/events/robot-opera/
CREATIVE TEAM
Artist: Wade Marynowsky
Music and Sound Design: Julian Knowles
Lighting Design: Mirabelle Wouters
Dramaturgy: Lee Wilson
Electrical Design: Ben Nash
Programmer: Imran Khan
Programmer: Adam Hinshaw
You can read more about this project here

I’m currently working on programming some software processing chains for a series of responsive ambient media works. In these works sensing technologies track and respond to viewers in the space and create subtle ambient responses across three video panels.

We’ve just completed some video documentation of our mediatized performance work ‘Ghost Ships’, which we shot in the studios at Macquarie University in Sydney.
‘Ghost Ships’ is a work for wireless wearable performance interface and intelligent lighting systems. The work uses of an unencumbered wireless performance interface to drive all media elements via free air gestures from a single on stage performer. Through the use of a wearable microcontroller and sensor system designed for the project by the artists, a single performer is able to play the entire theatrical space (light, sound, video) through arm and hand gestures. This includes an intelligent moving light system that moves theatrical lights and changes light parameters in response to the performer’s gestures.
This is an evolving prototype of an interface we’ve been working on for a couple of years now. You can read about some of the R&D work here.
Software/media programming: Julian Knowles
Wearable interface design and additional programming: Donna Hewitt
Music: Julian Knowles
Performance improvisations: Donna Hewitt

Here are a few snaps of the recent Macrophonics digital workshop for Vivid Sydney at the Museum of Contemporary Art in Sydney. Donna Hewitt and I delivered a 3 hour presentation/workshop on approaches to gesture controlled audio and video.

The workshop introduced participants to the Arduino platform and various approaches to designing gestural sensing systems. Below you can see our most recent wearable interface prototype (built as part of our ongoing creative R&D with Legs on the Wall) which has been extended to include a glove based interface in addition to flex and accelerometer sensors.
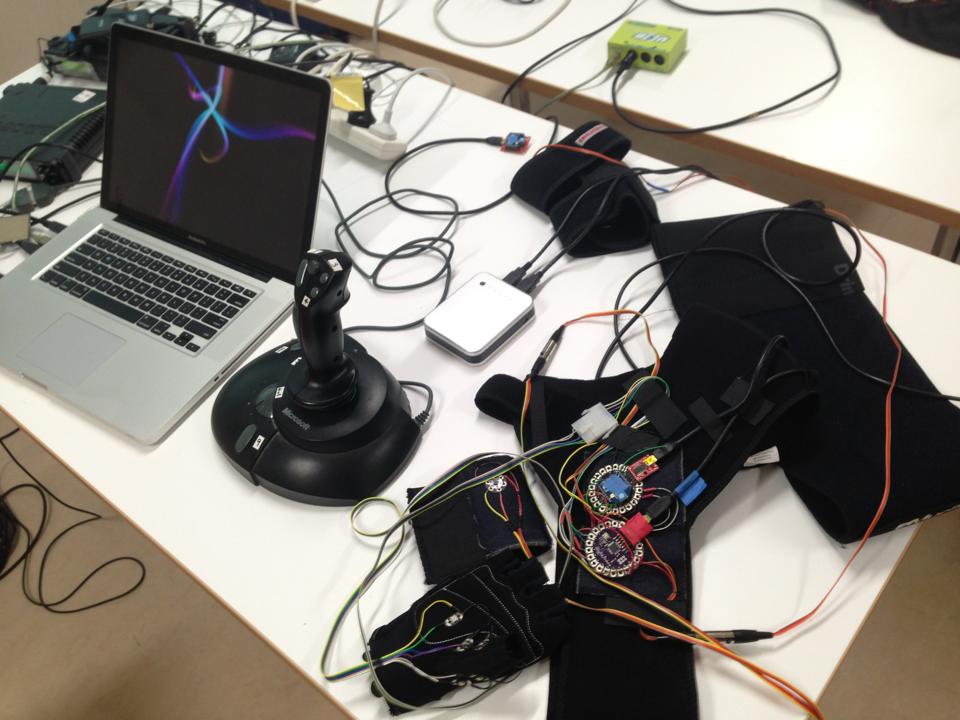
The second prototype has been designed so that it can be retrofitted to different performers of different sizes. Donna has used a neoprene and velcro system to mount sensors and provided a means to replace or change sensors via locking connectors for each sensor. The workshop also provided an opportunity to give an overview of the Max/Jitter patching environment and how gestural data was mapped in the process of achieving successful and engaging creative outcomes.

The workshop participants had a broad range of prior knowledge (from little, to quite a lot), but all seemed to get a lot out of the workshop process. And besides… it’s such a lovely building.

Vivid Ideas: The Making of the Future of Performance
Speakers: Patrick Nolan, Julian Knowles, Donna Hewitt, Timothy Ohl
Museum of Contemporary Art, Australia
6 June. 9:00 pm – 10:00 pm
Tickets:
General – $20.00
Industry – $15.00
Student/Educator – $10.00

In late 2012 the artist collective Macrophonics visited internationally-recognised physical theatre company, Legs On The Wall, to experiment with sensor-based technology and how it can be adapted specifically for live performances. What emerged was a tool for creating live art, one that uses both the body of a performer and the space they move through. Now Macrophonics and Legs On The Wall offer audiences a glimpse into what comes next – the creation of a new work that transforms the dancer into the conductor, the musician into the actor, and the stage into the interface.
This presentation will feature Professor Julian Knowles of Macquarie University’s Department of Media, Music, Communication and Cultural Studies and Patrick Nolan, Artistic Director of Legs On The Wall, and a demonstration of the Macrophonic’s technology with performer Tim Ohl.
THE MAKING OF…
In a series of fast-paced, one-hour tag-team sessions, creative teams from the worlds of television, gaming, music, and animation take us behind-the-scenes to introduce us to the people and processes that make huge creative projects a reality.
These sessions explore strategies for making international real-time collaborations work, find out what tools are essential for co-ordinating multi-part projects, and meet some of the world’s most interesting companies and creatives.
http://www.vividsydney.com/events/the-making-of-the-future-of-performance/
Radio Interview with Julian Knowles – 2SER Sydney, Australia (from 17:20 onwards)
[mixcloud width=”600″ height=”100″ iframe=”true”]http://www.mixcloud.com/stages-twoser-fm/stages-2ser-fm-june-5th-2013/[/mixcloud]
The accelerometer and wearable work progressed smoothly, without significant hitches. Donna’s wearable was completed in the final week. A few issues are worth mentioning here. She found the use of conductive thread and ribbon to be somewhat problematic. Great care needed to be exercised to prevent thread touching and shorting out (which reset the boards) and the high resistance also posed some issues. This caused Donna to make a decision to replace most of the conductive thread with conventional insulated hookup wire. Whilst initially concerned about appearance, the hookup wire actually looked great. Take a look.

A second issue was the total power draw of the sensors and Xbee wireless system. Donna found that the single AA battery could not supply enough power to run the system properly. With insufficient time to source and fit a higher capacity battery system before the public showing of our work, she decided to power the system from a USB cable and make the necessary modifications to the battery system following the residency.
To everyone’s surprise, when we connected the wearable to our test audio and video patches for the first time, the results were beyond our expectations. The wearable was highly responsive, ‘playable’ and Donna reported that she felt a fine sense of control over the media. She felt immersed in the media and the interface was highly intuitive, providing a rich set of possibilities for gestural control. Here is a video showing the initial hookup of the wearable interface to a test audio patch with the triaxial accelerometer and flex sensor mapped to audio filter parameters.
Macrophonics – first wearable trial
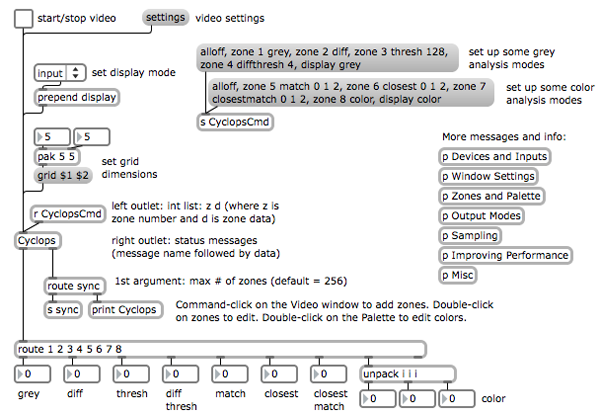
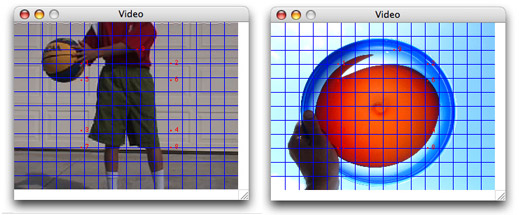
In the final week we experimented with a range of sensing techniques that picked up the position of performers on a stage. We experimented with the cv.jit and with Cyclops systems within MaxMSP. Both proved to be excellent. However given that they are video tracking systems they are inherently light dependent and so their output and behaviours are fundamentally affected by changing light states and conditions.
All of this is manageable with precise light control and programming (or the use of infra red cameras), however in the absence of more sophisticated lighting and camera resources, we decided to use ultrasonic range finders on the stage to locate the position of performers.

Two of these devices were placed on either side of the stage, outputting a stream of continuous controller data on the basis of the performer(s) proximity to the devices. These sensors were connected to Tim’s computer via an Arduino Uno. This allowed us to have a simple proximity sensing system on stage. The system was robust in respect of light, but suffered from occasional random noise/jitter that would last for a few seconds without obvious cause. This meant we had to apply heavy signal conditioning to the source data in Max/MSP to smooth out these ‘errors’ which in turn resulted in a significant amount of latency. Given these constraints, we used these sensors to drive events which did not have critical timing dependencies and could ramp in and out more gradually.
I spent a number of days in our final week programming the relationships between the sensing systems and the video elements, working with ‘retro’ 70s scanline/raster style video synth processing and time domain manipulations of quicktime movies. My computer also operated as a kind of ‘data central’, with all incoming sensor data coming in to my computer and from there being mapped/directed out to the other computers from a central patch in MaxMSP+Jitter.
I’ll post some documentation of the final results once we have an edit.

While Donna Hewitt works on building the wearable top with sensors, I am working on making ‘musical scenes’. These scenes are modular, with a range of musical elements which can be triggered or manipulated in an improvisational manner. They are designed for non-musician physical theatre performers/acrobats. The wearable top will have a Triaxial Accelerometer (reading X, Y, Z axes) mounted on the right arm, a flex sensor on the left elbow and some buttons. I have been using a Wii remote to simulate the accelerometer and buttons so I can work on parameter mapping and prototype some a/v scenes while Donna is working on building the wearable interface. The Wii remote can act as a hand held device which contains much of the functionality of the wearable (accelerometer and buttons)

I’m using the fantastic software Osculator to take the bluetooth Wiimote data and convert it to midi. I then stream the midi into a patch in MaxMSP which allows me to condition, scale and route the data streams before they get sent to Ableton Live to control audio.
The system is very robust and today I had it working to a distance of over 15 metres. Let’s hope the wifi from the Lilypad is as solid. Here is an example of the wii remote being used to control audio. The accelerometer XYZ outputs control various audio filter processing parameters and volume changes, while the buttons are used to trigger audio events.
Macrophonics. Open Source. Wiimote test from Julian Knowles on Vimeo.
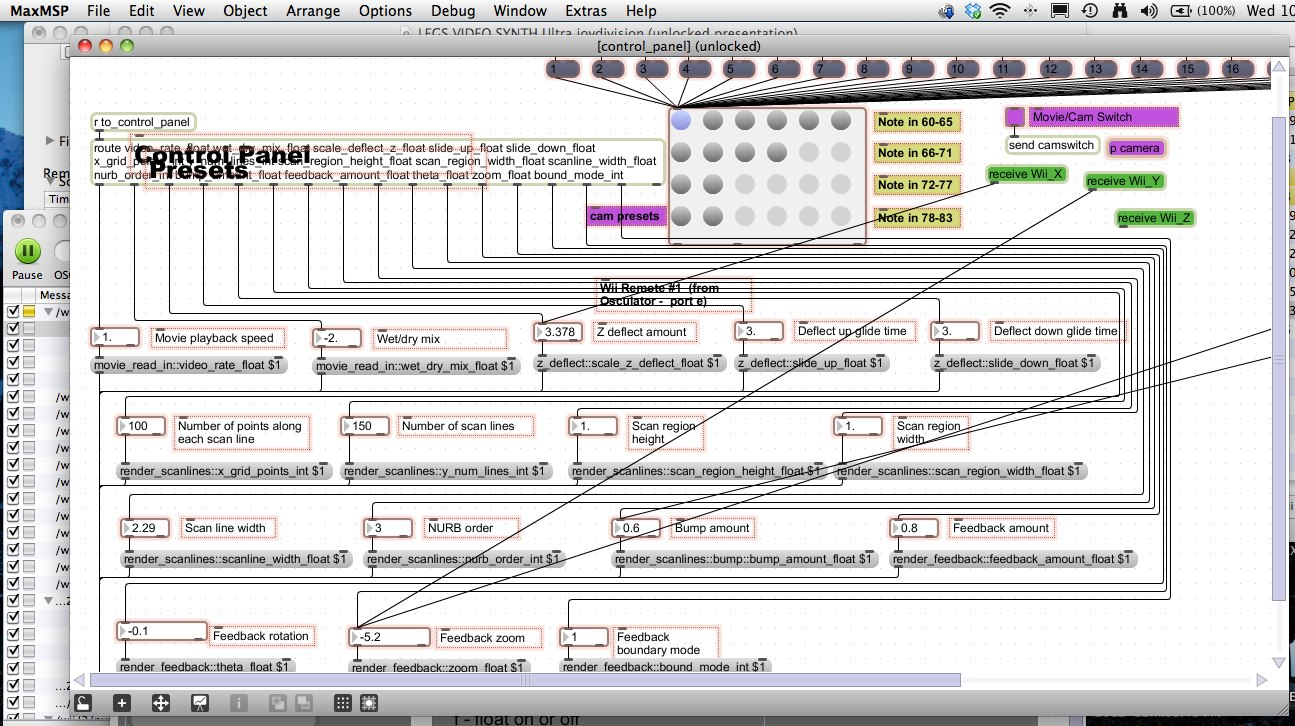
On the video side, I’ve been building a realtime video processing system in the Jitter environment.

The following example shows the wii remote accelerometer XYZ parameters mapped to video processing. No audio processing is taking place in this example. I’m just listening to some music while i program and test the video processing system. In this example the wii remote is driving a patch I have written in Jitter. A quicktime movie is used as input and the wiimote is driving real time processing. I have also extended the jitter patch to allow me to take live camera input.
Macrophonics. Open source. Prototyping video processing with wii remote
Donna has been working away on the wearable interface that will contain the functionality of the above (plus more). She has been designing the layout of the sensors and working out how to connect everything within the given constraints of the LilyPad system. The conductive thread that can be used to sew the sensors in and connect to the main board has quite a high resistance, and so runs need to be kept short. Likewise the run between the battery board and the Lilypad/Xbee board needs to be short, so as to keep maximum current available. Runs of conductive thread cannot be crossed over or they will short out.

We’re hoping to get the wearable interface completed in the next day or two so we can start to test it out with the modular musical materials. For the purposes of the showing, we’ll demonstrate three a/v ‘scenes’ in sequence, demonstrating different approaches and relationships between gesture and media.
The first scene will be drone/video synthesis based (with the performers stage positions driving processing). This state will have a very strong correlation between the audio and video processing gestures and will allow for multiple performers moving in relation to ultrasonic range finder sensors.
The second scene will involve the wearable interface, with direct/detailed gestural control of audio and video elements from a solo performer.
The third involve a complex interplay of sensors and parameters. The wearable interface will perform time domain manipulation and transport control on quicktime materials whilst driving filters and processors in the audio domain. The scene will also make use of physical objects sounding on stage, driven by the wearable interface. The interface data will be used to control signals flowing through physical objects (in this case cymbals and a snare drum) and audio/spatial relationships will unfold between the performer’s gestures, proximity to objects and sound behaviours. Tim Bruniges is taking care of the actuator setup.

Ultimately we are aiming for a fully responsive media environment. The aim is for the stage performer(s) to drive both audio and video elements and feel immersed in a highly responsive mediascape.

We’re now well into our Macrophonics Open Source creative development project at Legs on the Wall in Sydney. Lots of experimentation going on at this stage and we’ll start to resolve things down during the week before our stint in the theatre next week. We’ve opened out the exploration to sounding objects – driving audio signals into snare drums, cymbals and other resonant objects to set them off acoustically. The idea is that certain parts of the stage area contain assemblages of resonant objects and, through video and hardware sensing, performers will be able to activate the array of objects within an auditory ‘scene’ that we create. These auditory scenes will contain flexible sonic ‘modules’ – collections of sounds and musical motifs that can be recombined freely.

At the moment, we’re experimenting to find the resonant frequency of each of the trial objects. We also want to get a sense of how the objects behave with different input signals. At the moment, we’ve set up the input to the ‘actuators’ to run from discrete sends so that they can be blended/balanced with the signals from the main loudspeakers. From a control perspective, we will compare wearable sensors (using the Lilypad Arduino platform) located on the performer, with video tracking from above the stage. The wearable sensors have the advantage of being robust in respect of different lighting states, but need to be protected from damage by the physical theatre performer. This could prove challenging. The video tracking approach is robust from a physical point of view, but highly light dependant – so changing light conditions can affect the threshold settings for the tracking patches so that tracking becomes less reliable through changing light states.

The plan is to use the accelerometers on the wrists of the performers so that arm movements and rotations will output X,Y,Z co-ordinates. We’ll also be trying out light sensors on the performers, flex sensors and some heat sensors. The Lilypad is a great platform for wearable computing – the main issue is the small number of analog inputs, so we will need to investigate the potential to have multiple Lilypads sending data over wifi (via the Xbee platform) to a single computer. If this poses an issue for us, we could mount a second Lilypad/Xbee set up and have it transmitting to a second receiver at a second computer. As we have not yet established an approach to data mapping and distribution to the media performers, this second model may actually be more ergonomic. We shall see.

In the shot above you can see the Lilypad Arduino connected to a Lilypad Xbee board which takes care of the wireless communication of sensor data to an Xbee receiver at the computer. The Lilypad Xbee is currently getting power from a USB cable, but will soon be powered by an AAA battery. Once all the sensors have been connected up and prototyped in this way, the whole thing will be sewn into a garment and the sensors will be connected to the board via conductive thread.
